checking.h File Reference
#include <cml/vector/vector_expr.h>#include <cml/matrix/matrix_expr.h>#include <cml/quaternion/quaternion_expr.h>
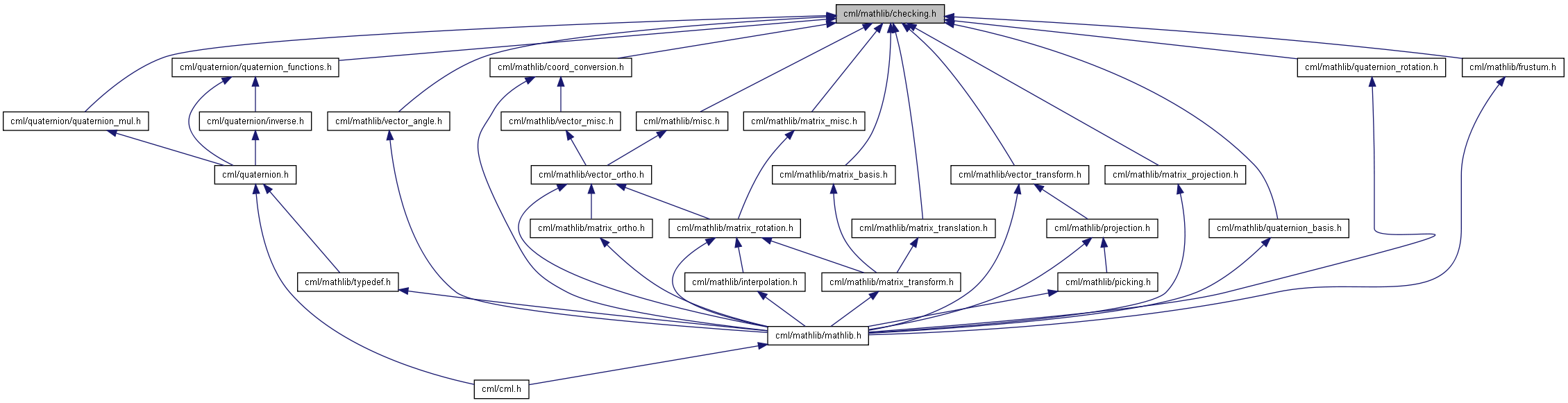
Include dependency graph for checking.h:

This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | cml |
| namespace | cml::detail |
Functions | |
| void | cml::detail::CheckIndex2 (size_t index) |
| Check for a valid integer index with value < 2. | |
| void | cml::detail::CheckIndex3 (size_t index) |
| Check for a valid integer index with value < 3. | |
| template<size_t N> | |
| void | cml::detail::CheckIndexN (size_t index) |
| Check for a valid integer index with value < N. | |
| template<class MatT > | |
| void | cml::detail::CheckMat (const MatT &) |
| Compile-time check for a matrix argument. | |
| template<class MatT > | |
| void | cml::detail::CheckMat2x2 (const MatT &m) |
| Check for a square matrix of size 2x2. | |
| template<class MatT > | |
| void | cml::detail::CheckMat3x3 (const MatT &m) |
| Check for a square matrix of size 3x3. | |
| template<class MatT > | |
| void | cml::detail::CheckMat4x4 (const MatT &m) |
| Check for a square matrix of size 4x4. | |
| template<class MatT > | |
| void | cml::detail::CheckMatAffine2D (const MatT &m) |
| Check for a matrix that can represent a 2D affine transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatAffine2D (const MatT &m, col_basis) |
| Check for a matrix that can represent a 2D col-basis affine transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatAffine2D (const MatT &m, row_basis) |
| Check for a matrix that can represent a 2D row-basis affine transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatAffine3D (const MatT &m) |
| Check for a matrix that can represent a 3D affine transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatAffine3D (const MatT &m, col_basis) |
| Check for a matrix that can represent a 3D col-basis affine transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatAffine3D (const MatT &m, row_basis) |
| Check for a matrix that can represent a 3D row-basis affine transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatHomogeneous3D (const MatT &m) |
| Check for a matrix that can represent a 3D homogenous transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatLinear2D (const MatT &m) |
| Check for a matrix that can represent a 2D linear transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatLinear3D (const MatT &m) |
| Check for a matrix that can represent a 3D linear transform. | |
| template<class MatT > | |
| void | cml::detail::CheckMatMin2x2 (const MatT &m) |
| Check for a matrix with minimum dimensions 2x2. | |
| template<class MatT > | |
| void | cml::detail::CheckMatMin3x3 (const MatT &m) |
| Check for a matrix with minimum dimensions 3x3. | |
| template<class MatT > | |
| void | cml::detail::CheckMatMin4x4 (const MatT &m) |
| Check for a matrix with minimum dimensions 4x4. | |
| template<class MatT , size_t N, class ErrorT > | |
| void | cml::detail::CheckMatMinN (const MatT &m) |
| Check for a matrix with minimum dimensions NxN. | |
| template<class MatT , size_t N, size_t M, class ErrorT > | |
| void | cml::detail::CheckMatMinNxM (const MatT &m) |
| Check for a matrix with minimum dimensions NxM. | |
| template<class MatT , size_t N, size_t M, class > | |
| void | cml::detail::CheckMatMinNxM (const MatT &m, dynamic_size_tag) |
| Run-time check for a matrix with minimum dimensions NxM. | |
| template<class MatT , size_t N, size_t M, class ErrorT > | |
| void | cml::detail::CheckMatMinNxM (const MatT &m, fixed_size_tag) |
| Compile-time check for a matrix with minimum dimensions NxM. | |
| template<class MatT , size_t N, class ErrorT > | |
| void | cml::detail::CheckMatN (const MatT &m) |
| Check for a square matrix of size NxN. | |
| template<class MatT , size_t N, size_t M, class ErrorT > | |
| void | cml::detail::CheckMatNxM (const MatT &m) |
| Check for a matrix of size NxM. | |
| template<class MatT , size_t N, size_t M, class > | |
| void | cml::detail::CheckMatNxM (const MatT &m, dynamic_size_tag) |
| Run-time check for a matrix of size NxM. | |
| template<class MatT , size_t N, size_t M, class ErrorT > | |
| void | cml::detail::CheckMatNxM (const MatT &m, fixed_size_tag) |
| Compile-time check for a matrix of size NxM. | |
| template<class MatT > | |
| void | cml::detail::CheckMatSquare (const MatT &m) |
| Check for a square matrix. | |
| template<class MatT , class > | |
| void | cml::detail::CheckMatSquare (const MatT &m, dynamic_size_tag) |
| Run-time check for a square matrix. | |
| template<class MatT , class ErrorT > | |
| void | cml::detail::CheckMatSquare (const MatT &m, fixed_size_tag) |
| Compile-time check for a square matrix. | |
| template<class QuatT > | |
| void | cml::detail::CheckQuat (const QuatT &) |
| Compile-time check for a quaternion argument. | |
| void | cml::detail::CheckValidArg (bool valid) |
| Run-time check for a valid argument. | |
| template<class VecT > | |
| void | cml::detail::CheckVec (const VecT &) |
| Compile-time check for a vector argument. | |
| template<class VecT > | |
| void | cml::detail::CheckVec2 (const VecT &v) |
| Check for a vector of size 2. | |
| template<class VecT > | |
| void | cml::detail::CheckVec2Or3 (const VecT &v) |
| Check for a vector of size 2 or 3. | |
| template<class VecT > | |
| void | cml::detail::CheckVec2Or3 (const VecT &v, dynamic_size_tag) |
| Run-time check for a vector of size 2 or 3. | |
| template<class VecT > | |
| void | cml::detail::CheckVec2Or3 (const VecT &v, fixed_size_tag) |
| Compile-time check for a vector of size 2 or 3. | |
| template<class VecT > | |
| void | cml::detail::CheckVec3 (const VecT &v) |
| Check for a vector of size 3. | |
| template<class VecT > | |
| void | cml::detail::CheckVec4 (const VecT &v) |
| Check for a vector of size 4. | |
| template<class VecT , size_t N, class ErrorT > | |
| void | cml::detail::CheckVecN (const VecT &v) |
| Check for a vector of size N. | |
| template<class VecT , size_t N, class > | |
| void | cml::detail::CheckVecN (const VecT &v, dynamic_size_tag) |
| Run-time check for a vector of size N. | |
| template<class VecT , size_t N, class ErrorT > | |
| void | cml::detail::CheckVecN (const VecT &v, fixed_size_tag) |
| Compile-time check for a vector of size N. | |
Detailed Description
Definition in file checking.h.
